随着工业自动化技术不断发展,对于生产自动化以及人机协同作业的需求逐渐提升。与此同时,对于机器人智能化、安全性、易操作、易部署等方面的要求也逐渐提高,越来越多中小型企业开始采用协作机器人系统来实现柔性生产。
GGII数据显示,2023年全球协作机器人(含四轴)销量9.99万台,同比增长 27.26%,市场规模75.95亿元,同比增长21.93%。2016年到2023年期间,全球协作机器人销量年均复合增速为37.15%。随着协作机器人价格开始降低,以及协作机器人安全性、稳定性和智能化不断提升,从工业级到消费级的拓展有望释放出规模化的新兴市场空间。
据预计,2024年全球协作机器人销量有望达13.32万台,同比增长超30%,市场规模有望突破100亿元。到2028年,全球协作机器人销量将超过41万台,市场规模接近320亿元。



截至2023年末,全球协作机器人厂商数量约150家,随着市场竞争愈加激烈,行业洗牌也在加速,新进入者数量减少。协作机器人行业已经进入一个新阶段,行业开始从无序逐渐走向有序,行业进入门槛有所提高,预计未来几年协作机器人厂商数量增长率持续放缓。
随着中国企业在协作机器人领域自主研发能力的提升,国产协作机器人品牌崛起,向国内外市场提供更具性价比的产品,带动了行业均价的下降。
以下是我们预测的五大产业技术与行业发展趋势:
一、大负载产品占有率上升
近年来,协作机器人的性能不断向工业机器人靠拢,稳定性和负载均有所提高;从3kg、5kg、10kg 的负载,提升至20kg、30kg、35kg、50kg的负载,大负载产品市场占有率逐渐提升;从1m/s的速度,提升至3m/s;精度也达到了工业级别的0.02mm。

从性能方面来看,协作机器人的进化正不断冲击着协作机器人与工业机器人的边界;从应用上来看,协作机器人越来越多地被应用在工业领域,并开拓了许多传统工业机器人无法进入的工作领域。
负载与速度的提升,对协作机器人的安全性提出更高的要求。为了保证人机协作的安全,一些新技术也应运而生。例如某海外巨头新推出的协作机器人,增配安全激光扫描仪,通过感知人体与机器人的距离来调整工作状态,增加了一个隐形的围栏来保障安全。
二、核心零部件性能优化 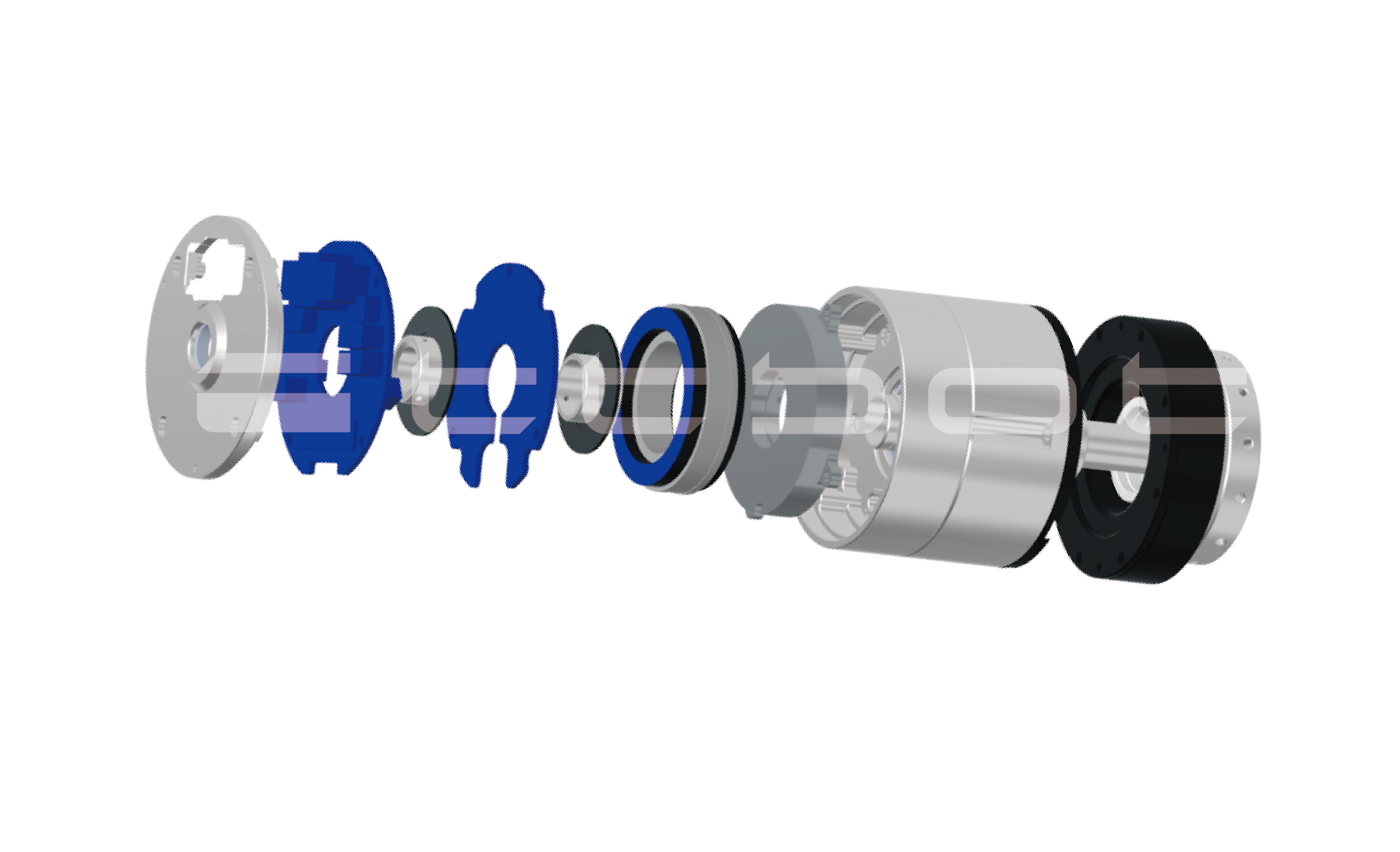
无框力矩电机:协作机器人所使用的电机必将朝高扭矩、大中空、高功率密度等方向发展。核心零部件减重,以提高功率密度将成为重点,实现协作机器人关节模组轻量化、高负载。
伺服驱动:协作机器人所应用的伺服驱动趋向集成化、小型化,同时具备高响应、高精度,以及更优的力控和防抖能力,具有更高的智能化。
编码器:机器人编码器是伺服控制的核心部件,目前在成本上,可制造性,精度等还有一定的局限。后续发展方向主要是围绕高精度、高集成度、高可靠性发展。 伺服控制性能提高,必然要求编码器技术的提高,高精度编码器尤为重要。由于需要关节输入输出两侧位置、速度等,编码器需要采集两端信息,高集成度的编码器同时采集两端信息,减少体积和走线尤为重要。另外编码器必然需要更高的可靠性,抗干扰,在强辐射、高低温等特殊场合依然保持可靠性。
减速器:作为连接动力源和执行机构的中间机构,减速器影响着关节模组的扭矩、精度、刚性等多方面的表现。为了能更好地满足协作机器人在精确操作和重复性任务中的需求,需要进一步提高减速器的精度和可靠性。集成化的设计和新材料的应用,都能够帮助减速器向小型化、轻量化发展,并提高其承载能力和耐用性。
三、感知性提升
协作机器人的智能化以及AI应用,离不开感知能力的提升,这就需要应用到各类智能传感器,如视觉、力与力矩传感器、IMU、电子皮肤等。只有具备力感知的机器人才能够更好地进行智能抓取,实现更安全的人机交互。此外,协作机器人要通过智能相机技术、3D视觉传感技术、3D激光雷达技术等、红外摄像头等技术实现“开眼看世界”。具有机器视觉的协作机器人可以解锁更多功能,使机器人能够完成检测类应用,可以抓取或检测立体的物体,实现无序抓取等应用。

除了视觉感知能力外,具备力感知能力也将打开协作机器人应用场景的另一扇大门,例如打磨、装配、按摩、康复甚至手术等。具备力的感知能力可以保证协作机器人在与人接触过程中的安全,并能够完成精度更高的任务。同时,具备力的感知能力将便于机器人的使用,人可以通过示教的方式给机器人安排工作,无需学习复杂的编程语言,协作效率也得以提升。
四、智能化
长久以来,机器人作为机电执行机构,只能替代简单、重复性的任务。对于长任务或者柔性任务,则无法展示身手。近年来,随着人工智能技术尤其是大模型的快速发展,越来越多的新应用涌现,例如无序抓取,智能检测等。随着机器人模型的发展、工业数据的积累和算力的提升,机器人逐渐开始通过自我学习的方式处理复杂问题,完成更多复杂任务。
AI 应用必定是未来协作机器人技术的发展趋势,只有具备人工智能,能自我学习、判断、决策的协作机器人才可以成为真正的协作机器人。只有这样才能打破机器人使用的编程门槛,实现真正的“开箱即用”,让人机交互更加简便、实时、安全。
五、模块化
底层部件的模块化为机器人整机的开发夯实了基础,加快了新产品的开发速度,增强了新产品的可靠性,也驱动了机器人本体形态的演进。不同规格的关节模组经过组合,配上相应的连杆,即可组成一款新的机器人,无需从底层模块开始从头开发。同时,不同机器人采用相同的关节模组,关节模组的使用数量会有大幅提升,更有利于其供应链的发展和技术的成熟。帮助企业降低采购成本,进而推动机器人整机的成本下降,从而加快机器人的应用推广。
综上所述,协作机器人行业正经历着快速的技术革新和市场扩张。随着负载能力的提升、核心零部件性能的优化、感知性的增强、智能化的发展以及模块化设计的应用,协作机器人正变得越来越灵活、智能和易于操作。这些技术趋势不仅推动了协作机器人在工业领域的深入应用,也为其在医疗、零售、服务等非工业领域的应用开辟了新的可能性。未来,随着技术的不断进步和成本的降低,协作机器人有望在更多领域实现规模化应用,成为推动工业自动化和智能化发展的重要力量。同时,这也意味着协作机器人厂商需要不断创新,以适应市场的变化和需求,确保在激烈的市场竞争中保持领先地位。