

4月22日,《工业应用移动机器人、复合机器人技术规范》团体标准发布,首次界定了复合机器人的定义与边界,构建复合机器人系列术语体系,明确产品设计标准和技术规范,奠定了行业发展壮大的基础。
如果把机械臂比作人的“手”,那么行走单元就是移动机器人的“脚”,手脚并用才可以具备更多技能,配置行走单元的复合移动机器人正在不断普及,在他们步履不停地为人类服务的同时,对于机器人的行走单元,你又知道多少呢?
01
又要“背”得动 还要“走”得远
行走单元是机器人移动行走的重要执行部件,由驱动装置、传动装置、位置检测元件、传感器、编码器等组成,具有保证机器人可以正常行走的重大责任:
“压力山大”,行走单元在机器人移动时,除了要支撑自身的重量,还要有强大的负载能力,并且要克服移动过程中的跨越障碍、精准定位、稳定性的挑战。
“走得更远”,行走单元根据作业任务的要求,带动机器人在各种场景下的空间内作业,有的地方狭小、环境复杂,通常都需要机器人体积更加小巧、运动灵活,有很好的运动能力和平衡能力,还得低能耗。
02
行走单元知多少?
当前主流的行走单元分类中,根据机器人的运动轨迹主要分为固定轨迹式和无固定轨迹式两种。
固定轨迹式行走单元主要用于工业机器人,如横梁式机器人。通常固定轨迹式工业机器人的机身底座安装在一个可移动的拖板座上,靠丝杠螺母驱动,整个机器人沿丝杆纵向移动。该工业机器人主要用在作业区域大的场合,比如大型设备装配、大面积喷涂等。不过固定轨迹式行走单元设置较为简单,且移动点位固定,因此其无法克服工业机器人非标与不够柔性的痛点。
无固定轨迹式行走单元根据结构特点主要分为履带式、足式、轮式以及轮足式,此外,还有一些特殊场景需求,产生了:蠕动式行走单元、混合式行走单元和蛇形行走单元等。
03
履带 足式 还是车轮?
当前,室外的工业机器人多采用履带式行走单元,一般室内的多采用车轮式行走单元,仿生机器人则根据需要采用相应的足式行走单元。
履带式行走单元适合在天然路面行走。其具有支承面积大、接地比压小、下陷度小、滚动阻力小、机动性强、越野性好等优点。但其缺点也十分明显,因为没有自定位轮机转向单元,只能靠左右两个履带的速度差实现转弯,因此在横向和前进方面都会产生滑动;转弯阻力大,不能准确的确定回转半径;结构复杂,重量大,运动惯性大,减振动能差,零件易损坏。因此目前履带式行走单元的应用场景一直没有得到大幅度的扩展。
足式行走单元有很大的适应性,尤其在有障碍物的通道或很难接近的工作场地更有优越性;足式行走在不平地面或松软地面上的运动速度较高,能耗较少。当前行业内受关注甚多的机器狗就是足式行走单元的典型代表。
轮式行走单元是机器人中应用最多的一种形式,在相对平坦的地面尤其是室内或者园区路面,用轮式行走单元就显得十分适合。但是普通轮式行走单元也有痛点,尤其是对崎岖不平的地面适应性不强,为了提高轮式的通过能力,我们需要加强轮式行走单元的功率密度获得更好的越障能力,同时也需要配合高强度的悬挂系统,另外,我们还可以将轮式和足式结合运用,就形成了独特的轮足式行走单元。
04
轮式行走 天太独有妙招
业内通常认为,足式行走拥有更强的能力,但是轮式行走仍然是效率更高的选择。不过,常规选用的轮毂电机方案,越障能力差且对多类型地面的适应性较弱,精度也不高。为了能够让轮式行走拓宽应用领域,天太机器人推出了智行系列ZU505、ZU605。
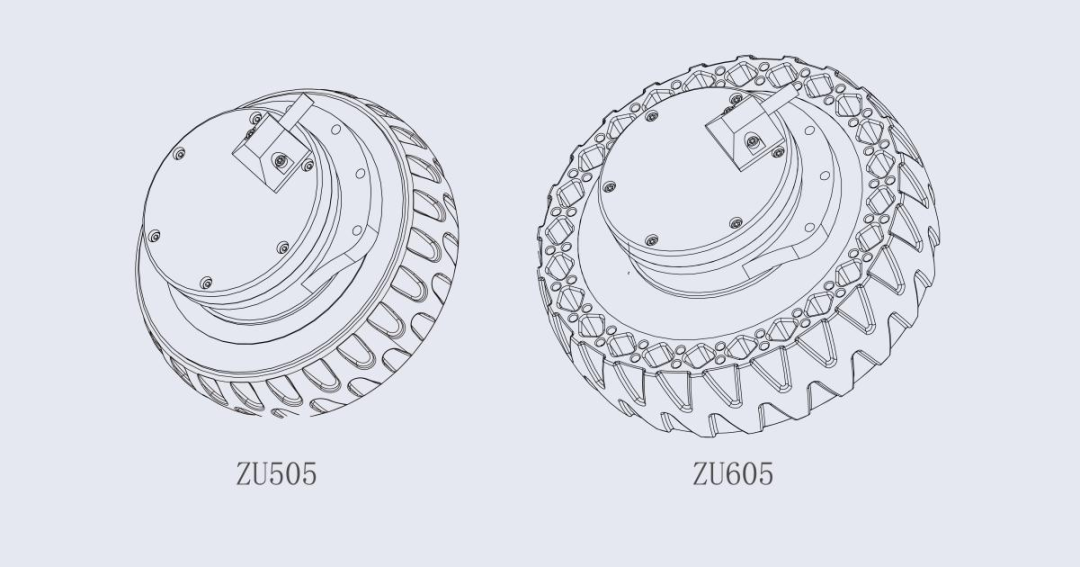
该行走单元由电机、轮毂、减速机、驱动器、编码器一体化集成,从而具备精度高、能耗低、通用性强的特点。其通过性能好,转动灵活、运行稳定;超薄一体化结构,内部紧凑、体积小、扭矩大、灵巧轻便、具备刚性强、负载大等优势。搭配着ZU505、ZU605的移动机器人行走控制精度高,越障能力达40mm,两轮差速结构下可支持载重120kg。
天太机器人推出的移动单元ZU505、ZU605可广泛适用于送餐、迎宾、消毒、教育、配送、巡检、商用扫地等各类服务机器人场景。天太机器人一直以“让机器人随处可见”为使命。瞄准痛点、拓宽边界方可使机器人运用更加自如。
